
In the previous blog post, we examined the current performance of cell phones in contrast to handheld GNSS devices. The cell phones had an overall horizontal accuracy of approximately 10 m with an error at the 95th percentile of approximately 25 m, where as, the handhelds had an accuracy of approximately 3 m with an error at 95 th percentile of approximately 5 m. The maximum error for cell phones were 66 m and for handhelds was 10 m. The larger spread of the position estimates can be attributed to cell phones having a higher sensitivity, allowing measurements with greater magnitude of multipath and measurement noise to be utilized within the processing engine.
In this post we examine, what is needed to enable high accuracy (m to cm level positioning) with a cell phone. To enable high accuracy positioning with a cell phone, we need cycle-slip free carrier-phase measurements and accurate error modelling of the satellite and atmospheric errors. Such a task is challenging and haven’t been achieved (as yet) utilizing our current generation of consumer grade cell phones. Within this blog post, we will review the measurement quality within a cellphone, relevant error models and the measurement residuals.
In this post we examine, what is needed to enable high accuracy (m to cm level positioning) with a cell phone. To enable high accuracy positioning with a cell phone, we need cycle-slip free carrier-phase measurements and accurate error modelling of the satellite and atmospheric errors. Such a task is challenging and haven’t been achieved (as yet) utilizing our current generation of consumer grade cell phones. Within this blog post, we will review the measurement quality within a cellphone, relevant error models and the measurement residuals.
Standard cell phone positioning
A lot of the positioning strategies currently utilized in cell phone positioning isn't publicly available. We know that cellphones have the ability to utilize apriori position through cellular triangulation and WiFi positioning. Focusing only on the GNSS positioning component, cell phones would rely on the real-time broadcast clock and orbit information. The broadcasted orbit and clock information is well documented, publically available with m-level precision. The main error models consists of accounting for the relativistic effects and mitigating the ionosphere and troposphere delay. This would provide the user a position with an accuracy of 10's meters. The precision of the user location would be highly dependent on user's local environment because of the sensitivity of the cellphone's antenna.
A lot of the positioning strategies currently utilized in cell phone positioning isn't publicly available. We know that cellphones have the ability to utilize apriori position through cellular triangulation and WiFi positioning. Focusing only on the GNSS positioning component, cell phones would rely on the real-time broadcast clock and orbit information. The broadcasted orbit and clock information is well documented, publically available with m-level precision. The main error models consists of accounting for the relativistic effects and mitigating the ionosphere and troposphere delay. This would provide the user a position with an accuracy of 10's meters. The precision of the user location would be highly dependent on user's local environment because of the sensitivity of the cellphone's antenna.

Precise cell phone positioning
The concept of precise cell phone positioning utilizes the same GNSS measurements, but three different components are introduced. These components are highlighted below. One of the key components is improved satellite position and clock information which has cm-level precision. Other key components such as the additional error modelling, measurements and filtering in the following sub-sections.
The concept of precise cell phone positioning utilizes the same GNSS measurements, but three different components are introduced. These components are highlighted below. One of the key components is improved satellite position and clock information which has cm-level precision. Other key components such as the additional error modelling, measurements and filtering in the following sub-sections.

Measurements
The pseudorange (\(\rho\)) is the time shift required to line up a replica of the code generated in the receiver with the received code from the satellite multiplied by the speed of light. Ideally, the time shift is the difference between the time of signal reception and the time of emission. Because these two timing systems are affected by their own internal hardware delays, which are introduced into the measurements, as such, they are referred to as pseudo-ranges. Pseudoranges are measured by a correlation detector that controls a delay lock loop which maintains the alignment (correlation peak) between the receiver-generated code replica and the actual incoming code. A rule of thumb for the precision of the pseudorange measurements is 1% of the period between successive code epochs. For the P-code, successive epochs are 0.1 microseconds apart, implying a measurement precision of 1 nanosecond. When multiplied by the speed of light, this implies a range measurement precision of 30 centimeters. For the C/A-code, the numbers are ten times less precise, of a range measurement precision of 3 meters.
Carrier phase measurements (\(\lambda\)) is the phase of the signal which remains when the incoming Doppler-shifted satellite carrier is differenced with the constant frequency generated in the receiver. This observable is obtained as a by-product of the correlation channel or from a squaring channel. Because the wavelength of the carrier is much shorter than the wavelength of either of the codes, the precision of the carrier beat phase measurements is much higher than the precision of the code pseudoranges. For the GPS L1 carrier signal, the wavelength is approximately 20 cm.
Carrier phase measurements (\(\lambda\)) is the phase of the signal which remains when the incoming Doppler-shifted satellite carrier is differenced with the constant frequency generated in the receiver. This observable is obtained as a by-product of the correlation channel or from a squaring channel. Because the wavelength of the carrier is much shorter than the wavelength of either of the codes, the precision of the carrier beat phase measurements is much higher than the precision of the code pseudoranges. For the GPS L1 carrier signal, the wavelength is approximately 20 cm.
|
Using the rule of thumb that carrier phase measurements can be made to about 1% of the wavelength, this implies a precision of 2 mm. The main disadvantage of the carrier phrase measurement involves the ambiguity. Obtaining the initial number of integer cycles of the carrier between the satellite and the receiver is difficult. Another challenge is maintaining an integer cycle count as the satellite-to-receiver changes with time, which is something most good quality receivers can do, but not so simple for phones. Because of the sensitivity of cell phone antennas, the signal is significantly more noisy.
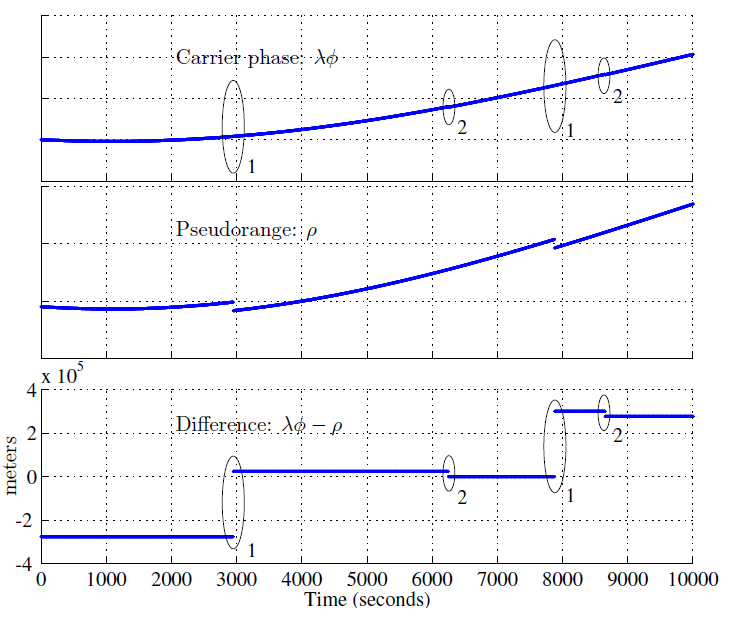
Presented in the figure to the left are the results presented by Humphreys et al (2016). The first plot illustrates the carrier phase measurements in units of range, the second plot the pseudorange measurements and the third plot illustrates the geometry free measurements. To examine the quality of the measurements, Humphreys et al (2016), differenced the carrier phase and pseudorange measurements to form a geometry free linear combination. By differencing the measurements, all common terms are eliminated and the remaining dominating component is the ambiguity and pseudorange multipath and noise. |
|
There three types of anomalies that were encountered.
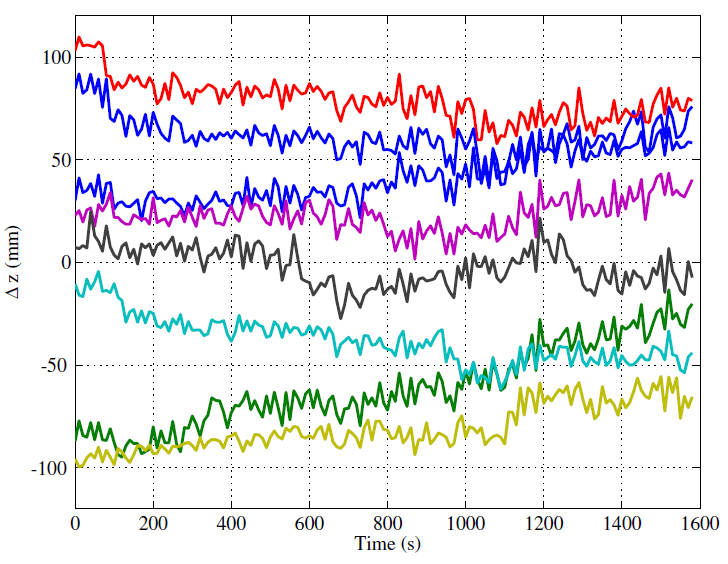
The double differenced zero baseline residuals between the measurements from a mobile phone and a geodetic receiver. Humphreys et al (2016) mentioned during his presentation that this may be addressed by Broadcom in a future firmware release. What is still promising though, the phone produced cycle slip free carrier measurements over a half hour interval, while outside in a clear open environment in static mode. |
|
Additional Error modelling
|
If a cell phone is within a 10 to 15 km to a base station, RTK can be performed which will eliminate orbit and clock errors as well as atmospheric effects. The primary limitations would be the requirement of localized infrastructure to enable RTK and NRTK.
If PPP is utilized, no localized infrastructure would be required. The primary information needed is precise satellite and orbit clock information which can be streamed to the user via internet protocol. The table on the left is an overview of the different error components that a cellphone will be susceptible to. |
Can mobile phones attain cm-level accuracy?
Yes, cell phones will be able to provide cm-level accuracy but due to antenna's sensitivity and cell clock stability will be unable to provide a robust cm-level solution.
It is interesting to see what the future has in store, in regards to improvements of GNSS patch antennas and augmenting GNSS with other cellphone sensors such as IMU and cameras.
In our next blog post, we'll review android's API for accessing the GNSS data.
It is interesting to see what the future has in store, in regards to improvements of GNSS patch antennas and augmenting GNSS with other cellphone sensors such as IMU and cameras.
In our next blog post, we'll review android's API for accessing the GNSS data.
Suggested reading
Humphreys T, Pesyna K, Shepard D, Murrian M, Gonzalez C, Novlan T (2016), Precise Positioning for the Mass Market, IGS Workshop 2016 Sydney
Fang-cheng Chan F, Joerger M, Khanafseh S, Pervan B, Jakubov O, (2014) Reducing the Jitters, GPS World
Garcia M (2016) First look at Android N GNSS raw measurements, ROKUBUN
Borre K, Akos D, Bertelsen N, Rinder P, Jensen, S (2007) A Software-Defined GPS and Galileo Receiver, A Single-Frequency Approach
Kirkko-Jaakkola M, Feng S, Xue Y, et al (2016) Effect of antenna location on GNSS positioning for ITS applications. In: Navigation Conference (ENC), 2016 European. IEEE, pp 1–7
Kirkko-Jaakkola M, Söderholm S, Honkala S, et al (2015) Low-Cost Precise Positioning Using a National GNSS Network
Banville S (2016) PPP with Smartphones: Are We There Yet?
Humphreys T, Pesyna K, Shepard D, Murrian M, Gonzalez C, Novlan T (2016), Precise Positioning for the Mass Market, IGS Workshop 2016 Sydney
Fang-cheng Chan F, Joerger M, Khanafseh S, Pervan B, Jakubov O, (2014) Reducing the Jitters, GPS World
Garcia M (2016) First look at Android N GNSS raw measurements, ROKUBUN
Borre K, Akos D, Bertelsen N, Rinder P, Jensen, S (2007) A Software-Defined GPS and Galileo Receiver, A Single-Frequency Approach
Kirkko-Jaakkola M, Feng S, Xue Y, et al (2016) Effect of antenna location on GNSS positioning for ITS applications. In: Navigation Conference (ENC), 2016 European. IEEE, pp 1–7
Kirkko-Jaakkola M, Söderholm S, Honkala S, et al (2015) Low-Cost Precise Positioning Using a National GNSS Network
Banville S (2016) PPP with Smartphones: Are We There Yet?
This blog post was part of a series of posts by the GNSS team at York University.
Garrett Seepersad
Surabhi Guruprasad
Maninder Gill
John Aggrey
Garrett Seepersad
Surabhi Guruprasad
Maninder Gill
John Aggrey
